-
计算机视觉算法——基于Anchor Free的目标检测网络总结
计算机视觉算法——基于Anchor Free的目标检测网络总结
计算机视觉算法——基于Anchor Free的目标检测网络总结
在之前我有总结过一些目标检测网络:
计算机视觉算法——目标检测网络总结
这些方法大都是Anchor Based方法,Anchor Based方法的主要问题是:- 检测器的性能和Anchor的Size和Aspect Ratio相关,在RetinaNet中改变Anchor能造成4%的AP的变化;
- 一般Anchor的Size和Aspect Ratio是固定的,很难处理形状变化大的目标,当发生任务迁移时,往往需要重新设计Anchor;
- 为了达到召回率,一般需要在图片中生成非常密集的Anchor Boxes。在训练时绝大部分的Anchor Boxes都会时负样本,容易造成正负样本不均的情况。
- Anchor的引入会使得网络的训练过程变得更加繁琐,想了解这一点大家可以去看看SSD的源码。
1. CornerNet
CornerNet发表于2018年ECCV,原论文名为《CornerNet: Detecting Objects as Paired Keypoints》,该论文将目标检测问题当作关键点检测问题来解决,通过检测目标框的左上角和右下角两个关键点得到预测框。从同期SOTA方法在MS COCO数据集的对比i结果看,相对于One-Stage方法精度有明显提升,但是相对于Two-Stage方法精度接近,但是该方法在推断时间上无优势:

1.1 关键知识点——网络结构及特点
网络结构如下图所示:

如上图所示,ConerNet模型包括三部分,首先是通过堆叠两个Hourglass Network提取图像Feature,然后就是将图像Feature分别通过Top-left Corner和Bottom-right Corner两个Prediction Modules。Prediction Module的具体结构如下图所示:

可以看出来Prediction Module整体是一个残差结构,其中Top-Left Corner Pooling Module我们稍后介绍,这里先看下Prediction Module的输出包括三部分:Heatmaps,Embeddings,Offsets。- Heatmaps用于预测角点的位置,输出的是 C C C个Channel的Feature, C C C指的是分类的类别个数(不包括背景类别)
- Embeddings用于对Corner进行分组,Heatmap上检测个角点如何判断是否属于同一个物体呢?就是通过Embeddings输出之间的距离来找到角点之间的对应关系,我看源码这里Embedings输出的是Channel数为1的Feature。
- Offsets用于对预测角点位置进行精修。输出的是Channel数为2的Feature,如下公式所示: o k = ( x k n − ⌊ x k n ⌋ , y k n − ⌊ y k n ⌋ ) \boldsymbol{o}_k=\left(\frac{x_k}{n}-\left\lfloor\frac{x_k}{n}\right\rfloor, \frac{y_k}{n}-\left\lfloor\frac{y_k}{n}\right\rfloor\right) ok=(nxk−⌊nxk⌋,nyk−⌊nyk⌋)我们通过Heatmaps输出的位置还原到原始分辨率后肯定是一个取整后的位置 ( ⌊ x n ⌋ , ⌊ y n ⌋ ) \left(\left\lfloor\frac{x}{n}\right\rfloor,\left\lfloor\frac{y}{n}\right\rfloor\right) (⌊nx⌋,⌊ny⌋),为了恢复原始分辨率的精度,网络就会输出这样一个修正量 o k \boldsymbol{o}_k ok
此外,在上图中还有一个Top-left Corner Pooling Module操作,该操作公式如下:
t i j = { max ( f t i j , t ( i + 1 ) j ) if i < H f t H j otherwise t_{i j}=\left\{\right. tij={max(ftij,t(i+1)j)ftHj if i<H otherwise l i j = { max ( f l i j , l i ( j + 1 ) ) if j < W f l i W otherwise l_{i j}=\left\{max ( f t i j , t ( i + 1 ) j ) if i < H f t H j otherwise \right. lij={max(flij,li(j+1))fliW if j<W otherwise 其实就是取水平和竖直最大值,最后求和,具体的案例下图所示:max ( f l i j , l i ( j + 1 ) ) if j < W f l i W otherwise

论文认为Corner Pooling之所以有效,是因为(1)目标定位框的中心难以确定,和边界框的四条边相关,但是每个顶点只与边界框的两条边相关,所以Corner跟他容易获取;(2)顶点更有效提供离散边界空间,作者做了Corner Pooling的实验如下:

1.2 关键知识点——正负样本匹配
对于每个角点,只有一个正样本,其余的都是负样本。但是为了保证样本均衡,作者在角点半径范围内区域会加大对负样本的惩罚力度。实际怎么做呢?
在构建Heatmaps Groundtruth时,如果不加任何惩罚,那么正样本处应该就为1,而负样本处为0;而加上惩罚后就是在角点半径范围内构建一个 e − x 2 + y 2 2 σ 2 e^{-\frac{x^2+y^2}{2 \sigma^2}} e−2σ2x2+y2的高斯分布,该 σ \sigma σ可以是个固定值,可以与物体大小相关,总而言之是越靠近角点的地方越接近于1,越远离角点的地方越接近于0。如下图所示:

作者做了负样本惩罚的消融实验如下:

注意,这里还是只有角点一个正样本,在计算 L pull L_{\text {pull }} Lpull 、 L push L_{\text {push }} Lpush 和 L o f f L_{o f f} Loff时还是只在角点处计算。1.3 关键知识点——损失计算
Corner损失函数定义如下: L = L det + α L pull + β L push + γ L o f f L=L_{\text {det }}+\alpha L_{\text {pull }}+\beta L_{\text {push }}+\gamma L_{o f f} L=Ldet +αLpull +βLpush +γLoff其中
L det L_{\text {det }} Ldet 是Heatmaps的Loss,采用的是Focal Loss,准确地说,是针对Heatmaps改进的Focal Loss,公式如下所示: L det = − 1 N ∑ c = 1 C ∑ i = 1 H ∑ j = 1 W { ( 1 − p c i j ) α log ( p c i j ) if y c i j = 1 ( 1 − y c i j ) β ( p c i j ) α log ( 1 − p c i j ) otherwise L_{\text {det }}=\frac{-1}{N} \sum_{c=1}^C \sum_{i=1}^H \sum_{j=1}^W\left\{\right. Ldet =N−1c=1∑Ci=1∑Hj=1∑W{(1−pcij)αlog(pcij)(1−ycij)β(pcij)αlog(1−pcij) if ycij=1 otherwise 其中 y c i j y_{c i j} ycij为真值, p c i j p_{c i j} pcij是预测值,我们分两部分来解释该公式:( 1 − p c i j ) α log ( p c i j ) if y c i j = 1 ( 1 − y c i j ) β ( p c i j ) α log ( 1 − p c i j ) otherwise - 当 y c i j = 1 y_{c i j}=1 ycij=1时,此时如果 p c i j p_{c i j} pcij接近于1时,说明该真值是容易预测的,那么我们减少其在样本中的权重,所以在log损失的基础上乘以 ( 1 − p c i j ) α \left(1-p_{c i j}\right)^\alpha (1−pcij)α;反之,如果 p c i j p_{c i j} pcij接近于0,说明该角点还没有学习到,所以会加大其权重。
- 而 y c i j y_{c i j} ycij不为 1 1 1时, p c i j p_{c i j} pcij应该输出 0 0 0。在角点附近 p c i j p_{c i j} pcij输出接近于1的概率时容易造成误检,为了对角点附接近于1的 ( p c i j ) α \left(p_{c i j}\right)^\alpha (pcij)α进行抑制,因此在log损失上乘以 ( p c i j ) α \left(p_{c i j}\right)^\alpha (pcij)α,这样网络就会更加关注这些误检的点,但是又正由于这个已经接近于角点了,因此输出稍微大一些也是情有可原的,因此用 ( 1 − y c i j ) β \left(1-y_{c i j}\right)^\beta (1−ycij)β来抑制一下惩罚。当然,如果在距离角点较远的地方输出接近于 1 1 1肯定也是不对的,那么此时 ( 1 − y c i j ) β \left(1-y_{c i j}\right)^\beta (1−ycij)β和 ( p c i j ) α \left(p_{c i j}\right)^\alpha (pcij)α都会用来加强惩罚。反之,如果 p c i j p_{c i j} pcij接近于0,那么 ( p c i j ) α \left(p_{c i j}\right)^\alpha (pcij)α就会告诉网络,这个负样本已经学好了,不需要太多关注。
L pull L_{\text {pull }} Lpull 和 L push L_{\text {push }} Lpush 是Embeddings的Loss, L pull L_{\text {pull }} Lpull 使同一函目标的顶点进行分组, L push L_{\text {push }} Lpush 用与分离不同目标的顶点: L pull = 1 N ∑ k = 1 N [ ( e t k − e k ) 2 + ( e b k − e k ) 2 ] L_{\text {pull }}=\frac{1}{N} \sum_{k=1}^N\left[\left(e_{t_k}-e_k\right)^2+\left(e_{b_k}-e_k\right)^2\right] Lpull =N1k=1∑N[(etk−ek)2+(ebk−ek)2] L p u s h = 1 N ( N − 1 ) ∑ k = 1 N ∑ j = 1 j ≠ k N max ( 0 , Δ − ∣ e k − e j ∣ ) L_{p u s h}=\frac{1}{N(N-1)} \sum_{k=1}^N \sum_{\substack{j=1 \\ j \neq k}}^N \max \left(0, \Delta-\left|e_k-e_j\right|\right) Lpush=N(N−1)1k=1∑Nj=1j=k∑Nmax(0,Δ−∣ek−ej∣)其中 e k e_k ek为真值,其他为网络输出结果, Δ \Delta Δ为在作者实验中设置为1,我们简单分析下就可以看出,同一物体的 L pull L_{\text {pull }} Lpull 应该为 0 0 0,而不同物体的Embeddings结果如果比较越接近 L p u s h L_{p u s h} Lpush就会越大。
L o f f L_{o f f} Loff是Offsets的Loss,采用的是Smooth L1 Loss,公式如下: L o f f = 1 N ∑ k = 1 N SmoothL1Loss ( o k , o ^ k ) L_{o f f}=\frac{1}{N} \sum_{k=1}^N \operatorname{SmoothL1Loss}\left(\boldsymbol{o}_k, \hat{\boldsymbol{o}}_k\right) Loff=N1k=1∑NSmoothL1Loss(ok,o^k) L det L_{\text {det }} Ldet 在正负样本处都会计算,而 L pull L_{\text {pull }} Lpull 、 L push L_{\text {push }} Lpush 和 L o f f L_{o f f} Loff只在正样本处计算2. CenterNet
CenterNet发表于2019年,原论文名为《Objects as Points》,CenterNet感觉是基于CornerNet进行的该井,使得检测速度和精度相比于One-Stage和Two-Stage的方法都了不小的提高,在和YOLO v3的比较中,相同速度下,CenterNet提高了4个左右的点。同时网络经过少量的扩展,就可以迁移到3D目标检测和人体关键点检测上。

2.1 关键知识点——网络结构及特点
CenterNet的网络结构是非常简单的,其实就是一个Backbone加上3个Head,3个Head分别输出80维的类别、2维的中心点坐标和2维的长宽偏置。Backbone的示意图如下图所示:

从左到右分别是(a)Hourglass-104,(b)ResNet,(c)DLA-34,(4)Modified DLA-34,CornerNet的Head是从1/4下采样率的Feature上接出来的,作者在论文中对比了不同的BackBone的结果,如下图所示,其中Hourglass效果是最好的:

2.2 关键知识点——损失计算
CornreNet的损失由三部分构成,分别是类别损失、目标中心偏置损失和目标大小损失: L det = L k + λ size L size + λ off L o f f L_{\text {det }}=L_k+\lambda_{\text {size }} L_{\text {size }}+\lambda_{\text {off }} L_{o f f} Ldet =Lk+λsize Lsize +λoff Loff首先,类被采用的是类别损失采用的Focal Loss:
L k = − 1 N ∑ x y c { ( 1 − Y ^ x y c ) α log ( Y ^ x y c ) if Y x y c = 1 ( 1 − Y x y c ) β ( Y ^ x y c ) α log ( 1 − Y ^ x y c ) otherwise L_k=\frac{-1}{N} \sum_{x y c}\left\{\right. Lk=N−1xyc∑⎩ ⎨ ⎧(1−Y^xyc)αlog(Y^xyc)(1−Yxyc)β(Y^xyc)αlog(1−Y^xyc) if Yxyc=1 otherwise 该公式的和CornerNet中的公式没有区别,在此就不再赘述。( 1 − Y ^ x y c ) α log ( Y ^ x y c ) if Y x y c = 1 ( 1 − Y x y c ) β ( Y ^ x y c ) α log ( 1 − Y ^ x y c ) otherwise
目标中心偏置损失采用的是L1 Loss,如下所示: L o f f = 1 N ∑ p ∣ O ^ p ~ − ( p R − p ~ ) ∣ L_{o f f}=\frac{1}{N} \sum_p\left|\hat{O}_{\tilde{p}}-\left(\frac{p}{R}-\tilde{p}\right)\right| Loff=N1p∑∣ ∣O^p~−(Rp−p~)∣ ∣其中, O ^ ∈ R W R × H R × 2 \hat{O} \in \mathcal{R}^{\frac{W}{R} \times \frac{H}{R} \times 2} O^∈RRW×RH×2为网络输出, R R R是特征图下采样倍率, p p p为原始图像中心点坐标, p ~ \tilde{p} p~为特征图上中心点坐标。
目标大小损失使用的同样是L1损失: L s i z e = 1 N ∑ k = 1 N ∣ S ^ p k − s k ∣ L_{s i z e}=\frac{1}{N} \sum_{k=1}^N\left|\hat{S} p_k-s_k\right| Lsize=N1k=1∑N∣ ∣S^pk−sk∣ ∣其中 S ^ ∈ R W ′ R × H R × 2 \hat{S} \in \mathcal{R}^{\frac{W^{\prime}}{R} \times \frac{H}{R} \times 2} S^∈RRW′×RH×2为预测值, s k = ( x 2 ( k ) − x 1 ( k ) , y 2 ( k ) − y 1 ( k ) ) s_k=\left(x_2^{(k)}-x_1^{(k)}, y_2^{(k)}-y_1^{(k)}\right) sk=(x2(k)−x1(k),y2(k)−y1(k))为真值, ( x 1 ( k ) , y 1 ( k ) , x 2 ( k ) , y 2 ( k ) ) \left(x_1^{(k)}, y_1^{(k)}, x_2^{(k)}, y_2^{(k)}\right) (x1(k),y1(k),x2(k),y2(k))分别为左上角和右下角坐标。3. FCOS
FCOS发表于2019年CVPR,原论文名为《Fully Convolutional One-Stage Object Detection》,它与当时的SOTA方法结果对比如下:

3.1 关键知识点——网络结构及特点
网络结构如下图所示:
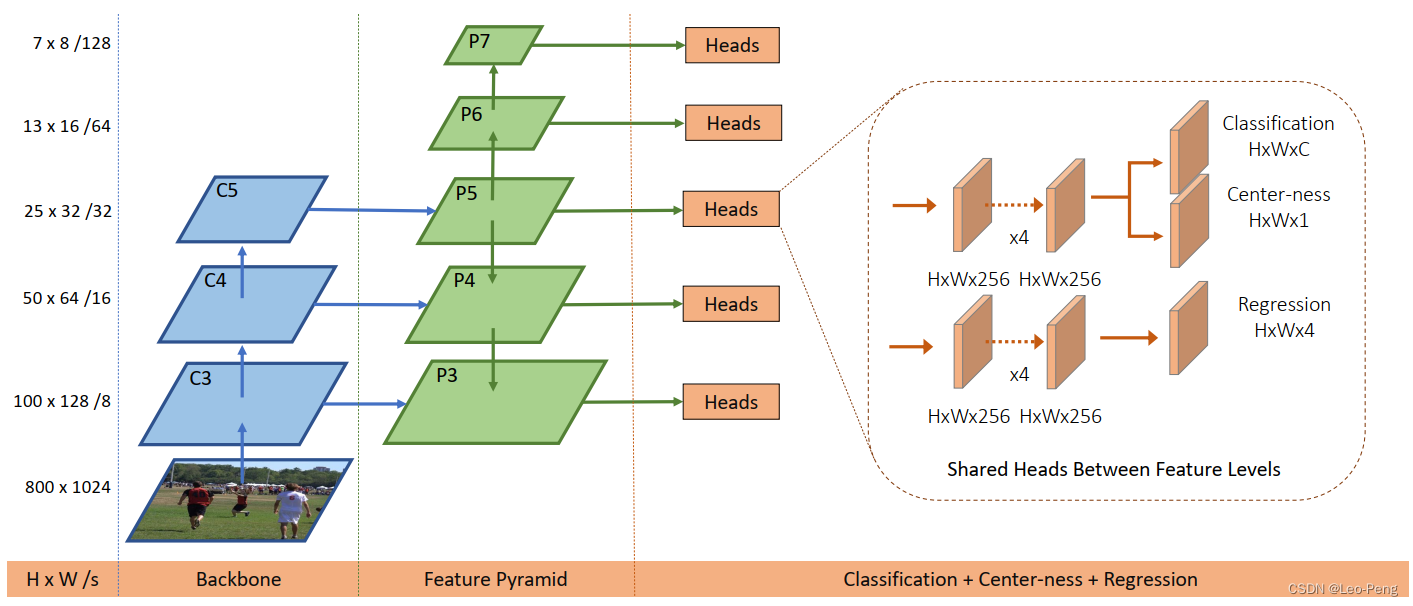
通过上图网络结构还是一目了然的,需要注意的几点是:- 不同分辨率上的检测头是共享权重的,每个头都是先经过四个Conv+Group Nomalization+ReLU的模块,最后通过Kernel Size为3的卷积输出。
- Classification头一共有80个Channel,对应COCO数据集的80个类别,也就是说每一个Grid对应的就只有一个类别输出。
- Regression头输出的是四个值,分别是距离边框左侧、上侧、右侧、底侧的距离: x min = c x − l ⋅ s x_{\min }=c_x-l \cdot s xmin=cx−l⋅s x min = c x − t ⋅ s x_{\min }=c_x-t \cdot s xmin=cx−t⋅s x min = c x − r ⋅ s x_{\min }=c_x-r \cdot s xmin=cx−r⋅s x min = c x − b ⋅ s x_{\min }=c_x-b \cdot s xmin=cx−b⋅s其中 l , t , r , b l, t, r, b l,t,r,b为网络的输出值,由于输出值是在特征图的尺度上,因此需要乘以一个尺度参数 s s s。 c x , c y c_x, c_y cx,cy是参考点映射到原图的坐标。
- Centerness头输出的是一个值,反应的是预测点相对与目标中心点的远近程度:
centerness
=
min
(
l
∗
,
r
∗
)
max
(
l
∗
,
r
∗
)
×
min
(
t
∗
,
b
∗
)
max
(
t
∗
,
b
∗
)
\text { centerness }=\sqrt{\frac{\min \left(l^*, r^*\right)}{\max \left(l^*, r^*\right)} \times \frac{\min \left(t^*, b^*\right)}{\max \left(t^*, b^*\right)}}
centerness =max(l∗,r∗)min(l∗,r∗)×max(t∗,b∗)min(t∗,b∗)其中
l
∗
,
t
∗
,
r
∗
,
b
∗
l^*, t^*, r^*, b^*
l∗,t∗,r∗,b∗是当前预测点相对于Ground Truth各个方向边界的距离,该值输出的范围是0-1,当预测点位于Ground Truth的Bounding Box的中心点时,该值为1,当位于Bounding Box的边界时,该值为0。在论文中,作者有做关于Centerness头的消融实验

我们可以看到,当加入Centerness监督时,AP都有非常大的提升。
3.2 关键知识点——正负样本匹配
关于FCOS的正负样本匹配一共有两个版本,最开始的版本作者将落入Ground Truth的Bounding Box内的Grid都作为正样本,但是后来通过是实验发现,落入Ground Truth的Bounding Box的中心部分区域的Grid的作为正样本。
由于我们每个Grid只会输出一种类别,如果同一个Grid同时落入两个Ground Truth Bounding Box中,就会面临一个Ambiguity问题,在论文中,作者指出这种情况就会默认将该Grid分配面积Area最小的Ground Truth Box。如下图就会分配给球拍:

但是结合FPN结构,将不同大小的GroundTruth分配到不同分辨率输出上,该问题可以得到大大缓解。3.3 关键知识点——损失计算
FCOS的损失计算函数如下: L ( { p x , y } , { t x , y } ) = 1 N pos ∑ x , y L c l s ( p x , y , c x , y ∗ ) + λ N p o s ∑ x , y 1 { c x , y ∗ > 0 } L r e g ( t x , y , t x , y ∗ ) + λ N p o s ∑ x , y 1 { c x , y ∗ > 0 } L c e n t e r n e s s ( s x , y , s x , y ∗ )
L({px,y},{tx,y})=Npos 1x,y∑Lcls(px,y,cx,y∗)+Nposλx,y∑1{cx,y∗>0}Lreg(tx,y,tx,y∗)+Nposλx,y∑1{cx,y∗>0}Lcenterness(sx,y,sx,y∗)其中分类损失 L c l s L_{\mathrm{cls}} Lcls采用的BECLoss+FocalLoss,回归损失 L r e g L_{\mathrm{reg}} Lreg和中心度损失 L c e n t e r n e s s L_{\mathrm{centerness}} Lcenterness损失只计算正样本下的损失。回归损失 L r e g L_{\mathrm{reg}} Lreg为GIoULoss,而 L c e n t e r n e s s L_{\mathrm{centerness}} Lcenterness损失为BCELoss。L ( { p x , y } , { t x , y } ) = 1 N pos ∑ x , y L c l s ( p x , y , c x , y ∗ ) + λ N p o s ∑ x , y 1 { c x , y ∗ > 0 } L r e g ( t x , y , t x , y ∗ ) + λ N p o s ∑ x , y 1 { c x , y ∗ > 0 } L c e n t e r n e s s ( s x , y , s x , y ∗ ) 4. YOLOX
YOLOX发表于2021年,原论文名为《YOLOX: Exceeding YOLO Series in 2021》,YOLOX相对于之前的YOLO版本的一些的亮点在于:Anchor-Free,Decoupeld Detection Head和Advanced Label Assigning Strategy。与SOTA方法对比如下,相对于YOLO v5是有一定的提升:

4.1 关键知识点——网络结构及特点
YOLOX的Backbone的和YOLO v5的Backbone是一摸一样的,对YOLO v5 BackBone不熟悉的同学可以参考计算机视觉算法——目标检测网络总结,该Backbone主要的特点是使用CSP-Darknet53、SPPF和CSP-PAN的模块或者结构。
YOLOX采用的Decoupled Head,这与YOLO v5的Coupled Head的区别如下图所示:

其中Coupled Head和Decoupled Head具体区别是:- Coupled Head通过一个 1 × 1 1\times1 1×1的卷积最后输出维度为 N × ( C + 4 + 1 ) N\times(C+4+1) N×(C+4+1)的预测结果,并且不同分辨率的检测头参数共享。而Decouple Head是分别通过三个ConvBNSiLU模块和 1 × 1 1\times1 1×1的卷积后分别输出 C , 4 , 1 C, 4, 1 C,4,1的预测结果,分别对应类别、位置参数和IoU,其中IoU具体指的在训练过程中是如果该某样本被划分为正样本时,那么IoU的GroundTruth为1,而如果该Head预测为负样本时,那么IoU的GroundTruth为0。
- 在Coupled Head中不同分辨率下的参数共享,而Decouple Head在不同分辨率下参数不共享。
- Coupled Head中预测的四个位置信息是和对应的Anchor强相关的,而Decoupled Head中使用的Anchor Free的思想,其预测的位置信息计算公式如下所示: x center = c x + t x x_{\text {center }}=c_x+t_x xcenter =cx+tx y center = c y + t y y_{\text {center }}=c_y+t_y ycenter =cy+ty w = e t w w=e^{t_w} w=etw h = e t h h=e^{t_h} h=eth其中 t x , t y , t w , t h t_x,t_y,t_w,t_h tx,ty,tw,th为网络输出参数, c x , c y c_x,c_y cx,cy对应栅格的左上角坐标
论文中指出使用Decoupled head不但使得收敛速度变快,同时使得AP也有所提升:

4.2 关键知识点——正负样本匹配
YOLOX中使用的正负样本匹配的是SimOTA,SimOTA是OTA(Optimal Transport Assignment)简化得到的,OTA对应的论文名为《Optimal transport assignment for object detection》,目的是将匹配正负样本的过程看成一个最优传输问题,和DETR中的匹配方法区别是,在DETR中预测结果和真值是一对一匹配,而在SimOTA中预测结果和真值是多对一匹配。下面我们来具体看下:
首先为什么要左SimOTA呢,主要是为不同的目标设定不同数量的正样本数,假如我们在一张图中同时检测一个人和一个网球,如果在人和网球设置相同多的正样本,因为人和网球的大小有着明显的区别,因此要么人就只有一两个正样本,要么网球就会很多低质量的正样本,这样肯定是不合理的。在FCOS中,将正样本数量和真值Bounding Box的大小关联在一定程度上解决了该问题,而SimOTA则是将这一解决方案做得更加细致了。
SimOTA步骤如下:
- 确定正样本候选区域;
- 计算每个正样本对Ground Truth的Regression Loss和Class Loss作为匹配的Cost;
- 获取每个Ground Truth分配到的正样本数,具体操作是计算IOU大小前10的的样本,将前10样本的IOU相加取整则得到Dynamic_K,即Ground Truth应该分配到的正样本数。
- 为每个Ground Truth取Cost最小的前Dynamic_K个样本作为正样本。
- 人工去掉同一个样本被分配到多个Ground Truth的正样本的情况。
这里我们来理解下第3步中的Dynamic_K的原理,其实很好理解,还是以人和网球的例子为例,同样分辨率的特征图上,与人的Ground Truth IOU较大的预测值肯定较多,因此按照第3步计算出来的Dynamic_K肯定就大,人获得的正样本就多。
如下表所示,SimOTA给网络带来了2.3个点的AP提升:

4.3 关键知识点——损失计算
由于在网络检测头中有类别、位置参数和IoU三个分支,因此损失由 L c l s 、 L r e g 、 L i o u L_{cls}、L_{reg}、L_{iou} Lcls、Lreg、Liou这三部分组成: L o s s = L c l s + λ L r e g + L i o u N p o s L o s s=\frac{L_{c l s}+\lambda L_{r e g}+L_{iou}}{N_{p o s}} Loss=NposLcls+λLreg+Liou其中 L c l s 、 L i o u L_{cls}、L_{iou} Lcls、Liou由BCELoss,而 L r e g L_{reg} Lreg采用的是IoULoss,还需要注意的是, L c l s 、 L r e g L_{cls}、L_{reg} Lcls、Lreg只计算正样本损失,而 L i o u L_{iou} Liou既计算正样本损失有计算负样本损失,其实可以理解为我们先判断这里是否存在物体,然后再看物体的类别和位置。 N p o s N_{pos} Npos指的是被划分为正样本的Anchor Point数。
以上就是我对几篇Anchor Free的方法的总结,有问题欢迎交流~
-
相关阅读:
【微服务开篇-RestTemplate服务调用、Eureka注册中心、Nacos注册中心】
现在大火的低代码是怎么回事?进来聊聊低代码
LeetCode——Weekly Contest 312
昨天访问量破记录
CSAPP-Data Lab
全志V853如何动态打开蓝牙kernel部分的log?
详解 HTTP
14.OpenFeign 源码分析(springcloud)
CASIO fx4850万能坐标计算程序
javascript中this的指向问题
- 原文地址:https://blog.csdn.net/weixin_44580210/article/details/127043289