-
[图像处理]14.分割算法比较 OTSU算法+自适应阈值算法+分水岭
参考文献:
OTSU阈值分割+孔洞填充+海陆分离_SwordKii的博客-CSDN博客
drawContours函数_普通网友的博客-CSDN博客_drawcontours
R329-opencv阈值分割算法——自适应阈值_Third Impact的博客-CSDN博客_opencv自适应阈值分割
分水岭算法的python实现及解析_进不去的博客-CSDN博客_python分水岭算法
分水岭算法的理解和应用_Evonne_H的博客-CSDN博客_分水岭算法详细介绍与应用
目录
OTSU大津算法(常用于海陆分割)
1.原理:
寻找海陆分割二值化的阈值,通过统计学方法,常用来处理直方图中有俩个峰的图像,就如同海陆俩个颜色比较多的图片,找到方差最大的时候的灰度值
2.代码API
#获取二值图像轮廓
contours, hierarchy=cv.findContours( img, mode, method);
contours:输出的轮廓,每一个轮廓用std::vector
hierarchy:输出的轮廓关系的存储;
img:二值图像;
mode:轮廓模式
cv.RETR_EXTERNAL:只有最外层轮廓;
cv.RETR_LIST : 检测所有的轮廓,但是轮廓之间都是单独的,没有父子关系;
cv.RETR_CCOMP : 检测所有的轮廓,但所有轮廓只建立两个等级关系;如果超过两个等级关系的,从顶层开始每两层分解成一个轮廓;
cv.RETR_TREE : 检测所有轮廓,所有轮廓按照真实的情况建立等级关系,层数不限;
method:轮廓处理:
cv.CHAIN_APPROX_NONE :不经过处理
cv.CHAIN_APPROX_SIMPLE:压缩轮廓
cv.CHAIN_APPROX_TC89_L1:用Teh-Chin chain approximation algorithm的一种算法压缩轮廓;
cv.CHAIN_APPROX_TC89_KCOS:用Teh-Chin chain approximation algorithm的另一种算法压缩轮廓;
#画出二值图像轮廓cv.drawContours( img, contours, contourIdx,color, thickness=1)
函数参数详解:
contours:输入的轮廓组,每一组轮廓由点vector构成,
contourIdx:int 指明画第几个轮廓,如果该参数为负值,则画全部轮廓,
color:轮廓的颜色,
thickness:轮廓的线宽,如果为负值或CV_FILLED表示填充轮廓内部,
#轮廓面积
area = cv.contourArea(contours[i])
#填充轮廓
cv.fillPoly(img,contours,color)
3.实现:
- import cv2 as cv
- import matplotlib.pyplot as plt
- import numpy as np
- #解决中文显示问题,固定格式
- plt.rcParams['font.sans-serif']=['SimHei']
- plt.rcParams['axes.unicode_minus']=False
- #1.转化为灰度图
- pic1=cv.imread("DJI_0023.jpg")
- #2.高斯滤波去噪
- pic1 = cv.GaussianBlur(pic1, (5,5), 0) # 高斯滤波
- gray=cv.cvtColor(pic1,cv.COLOR_BGR2GRAY)
- #3.OUST算法转换为二值图
- floatshold,bin = cv.threshold(gray, 0, 255, cv.THRESH_BINARY+cv.THRESH_OTSU) #方法选择为THRESH_OTSU
- #4.形态学操作,闭运算去除孔洞,链接细小边缘
- kernel = cv.getStructuringElement(cv.MORPH_ELLIPSE, (10, 10))
- bin = cv.morphologyEx(bin, cv.MORPH_CLOSE, kernel)
- #4.获取轮廓
- contours, hierarchy=cv.findContours(bin, cv.RETR_TREE,cv.CHAIN_APPROX_NONE)
- #5.填充轮廓
- len_contour = len(contours)
- contour_list = []
- mask = np.zeros_like(bin, np.uint8) # 纯黑模板
- for i in range(len_contour):
- cv.drawContours(mask, contours,i,(255,255, 255), -1)
- print(mask)
- #6.彩色图片去除黑色蒙版
- pic2=cv.bitwise_and(pic1,pic1, mask=mask)
- #绘制图像
- fig,axes=plt.subplots(nrows=2,ncols=2,figsize=(10,10))
- axes[0,0].set_title("原图")
- axes[0,0].imshow(pic1[:,:,::-1])
- axes[0,1].set_title("二值图")
- axes[0,1].imshow(bin,plt.cm.gray)
- axes[1,0].set_title("轮廓合并")
- axes[1,0].imshow(mask,plt.cm.gray)
- axes[1,1].set_title("彩色图片去除黑色蒙版")
- axes[1,1].imshow(pic2[:,:,::-1])
- plt.show()
- cv.waitKey()
结果:

大津算法有利于海路分割,屏蔽海洋
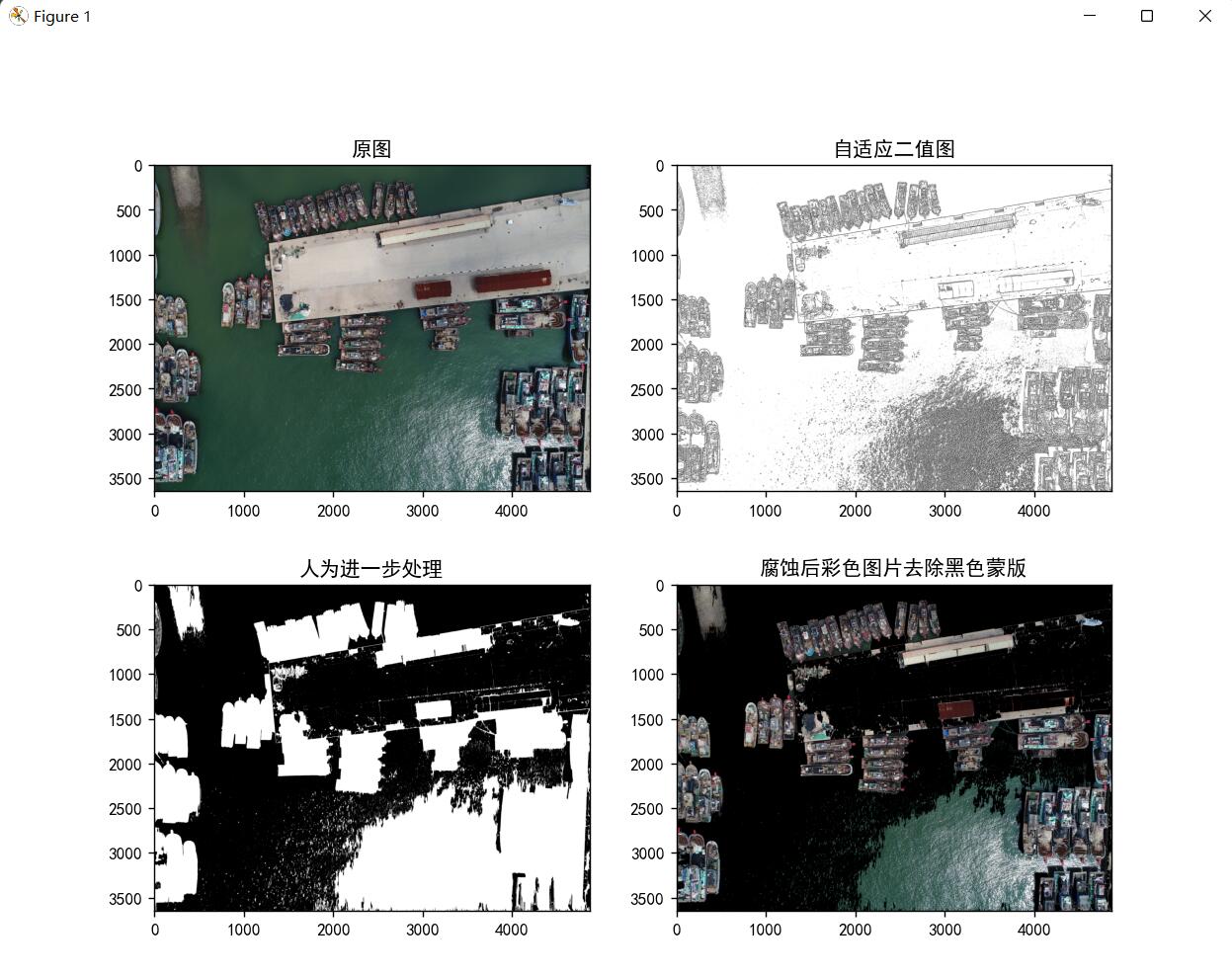
自适应阈值算法(复杂颜色地物提取例如打鱼船)
1.原理
对分割的小块进行二值化阈值处理,而不考虑整体图像,有利于处理光照不均匀的图像
2.代码API
dst = cv.adaptiveThreshold(src, maxValue, adaptiveMethod, thresholdType, blockSize, C)
src:要处理的图像数据,为单通道灰度图像;
maxValue:double类型,二值化后的最大值;
adaptiveMethod:动态计算阈值的方法,有以下两种:cv.ADAPTIVE_THRESH_MEAN_C:计算区域内的平均值减去C;
cv.ADAPTIVE_THRESH_GAUSSIAN_C:计算区域内的高斯均值减去C;thresholdType:二值化类型flags,在该函数中仅能使用cv.THRESH_BINARY和cv.THRESH_BINARY_INV两种
blockSize:动态化计算阈值时所使用的区域的大小,类似卷积时的卷积核大小,需要为奇数;
C:计算区域内的均值后减去的常量,最后作为阈值;3.实现
1.
- import cv2 as cv
- import matplotlib.pyplot as plt
- import numpy as np
- #解决中文显示问题,固定格式
- plt.rcParams['font.sans-serif']=['SimHei']
- plt.rcParams['axes.unicode_minus']=False
- #1.转化为灰度图
- pic1=cv.imread("DJI_0023.jpg")
- #2.高斯滤波去噪
- pic1 = cv.GaussianBlur(pic1, (5,5), 0) # 高斯滤波
- gray=cv.cvtColor(pic1,cv.COLOR_BGR2GRAY)
- #3.adaptiveThreshold转换为二值图
- bin=cv.adaptiveThreshold(gray,255,cv.ADAPTIVE_THRESH_GAUSSIAN_C,cv.THRESH_BINARY,11,5)
- #4.形态学操作,闭运算去除孔洞,链接细小边缘
- bin2=255-bin
- bin2=cv.medianBlur(bin2,5)#中值去噪
- bin2=cv.dilate(bin2,np.ones(20,np.uint8))#膨胀
- #5.获取轮廓
- contours, hierarchy=cv.findContours(bin2, cv.RETR_TREE,cv.CHAIN_APPROX_NONE)
- #6.填充轮廓
- len_contour = len(contours)
- contour_list = []
- for i in range(len_contour):
- area=cv.contourArea(contours[i])
- if(area<5000):
- contour_list.append(contours[i])
- cv.fillPoly(bin2,contour_list,(255,255,255))
- #7.腐蚀
- bin3=cv.erode(bin2,np.ones(20,np.uint8))#腐蚀
- #8.彩色图片去除黑色蒙版
- pic2=cv.bitwise_and(pic1,pic1, mask=bin3)
- #绘制图像
- fig,axes=plt.subplots(nrows=2,ncols=2,figsize=(10,10))
- axes[0,0].set_title("原图")
- axes[0,0].imshow(pic1[:,:,::-1])
- axes[0,1].set_title("自适应二值图")
- axes[0,1].imshow(bin,plt.cm.gray)
- axes[1,0].set_title("人为进一步处理")
- axes[1,0].imshow(bin3,plt.cm.gray)
- axes[1,1].set_title("腐蚀后彩色图片去除黑色蒙版")
- axes[1,1].imshow(pic2[:,:,::-1])
- plt.show()
- cv.waitKey()

第三幅图靠作者的现阶段能力只能处理到这了。。不要嫌弃
噪声影响比较严重,对于复杂颜色的渔船提取较好
可见自适应二值化,对于边缘线提取比较有优势,但也提取了不必要的高亮海面部分
2.
如果扩大填充面积,area<50000,“船只”的提取情况更好一些,但相应不必要高亮海面也提取的更多
- import cv2 as cv
- import matplotlib.pyplot as plt
- import numpy as np
- #解决中文显示问题,固定格式
- plt.rcParams['font.sans-serif']=['SimHei']
- plt.rcParams['axes.unicode_minus']=False
- #1.转化为灰度图
- pic1=cv.imread("DJI_0023.jpg")
- #2.高斯滤波去噪
- pic1 = cv.GaussianBlur(pic1, (5,5), 0) # 高斯滤波
- gray=cv.cvtColor(pic1,cv.COLOR_BGR2GRAY)
- #3.adaptiveThreshold转换为二值图
- bin=cv.adaptiveThreshold(gray,255,cv.ADAPTIVE_THRESH_GAUSSIAN_C,cv.THRESH_BINARY,11,5)
- #4.形态学操作,闭运算去除孔洞,链接细小边缘
- bin2=255-bin
- bin2=cv.dilate(bin2,np.ones(20,np.uint8))#膨胀
- #5.获取轮廓
- contours, hierarchy=cv.findContours(bin2, cv.RETR_TREE,cv.CHAIN_APPROX_NONE)
- #6.填充轮廓
- len_contour = len(contours)
- contour_list = []
- # mask = np.zeros_like(bin, np.uint8) # 纯黑模板
- for i in range(len_contour):
- area=cv.contourArea(contours[i])
- if(area<50000):
- contour_list.append(contours[i])
- cv.fillPoly(bin2,contour_list,(255,255,255))
- #7.腐蚀
- bin3=cv.erode(bin2,np.ones(20,np.uint8))#腐蚀
- #8.彩色图片去除黑色蒙版
- pic2=cv.bitwise_and(pic1,pic1, mask=bin3)
- #绘制图像
- fig,axes=plt.subplots(nrows=2,ncols=2,figsize=(10,10))
- axes[0,0].set_title("原图")
- axes[0,0].imshow(pic1[:,:,::-1])
- axes[0,1].set_title("自适应二值图")
- axes[0,1].imshow(bin,plt.cm.gray)
- axes[1,0].set_title("人为进一步处理")
- axes[1,0].imshow(bin3,plt.cm.gray)
- axes[1,1].set_title("腐蚀后彩色图片去除黑色蒙版")
- axes[1,1].imshow(pic2[:,:,::-1])
- plt.show()
- cv.waitKey()
3.自己调参数改算法步骤吧。累了,陆地提取的一点不好。。。
分水岭算法
- import cv2 as cv
- import numpy as np
- import matplotlib.pyplot as plt
- # 解决中文显示问题,固定格式,直接复制下面俩行代码就行
- plt.rcParams['font.sans-serif'] = ['SimHei']
- plt.rcParams['axes.unicode_minus'] = False
- def watershed_image(image):
- """分水岭算法"""
- # 图像二值化
- blurred = cv.pyrMeanShiftFiltering(image, 10, 50) # 均值迁移滤波
- gray = cv.cvtColor(blurred, cv.COLOR_BGR2GRAY) # 转换成灰度图
- # cv.imshow("gray", gray)
- ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY_INV | cv.THRESH_OTSU) # 图像二值化
- # cv.imshow("binary", binary)
- # 去除噪声
- kernel = cv.getStructuringElement(cv.MORPH_RECT, (3, 3)) # 构造25×25的方形结构元素
- opening = cv.morphologyEx(binary, cv.MORPH_OPEN, kernel=kernel, iterations=2) # 开操作(需要去除图像中的任何白点噪声),迭代次数2
- # cv.imshow("noise removal", opening)
- # 确定背景区域sure_bg
- sure_bg = cv.dilate(opening, kernel, iterations=3) # 腐蚀,迭代次数3,会去除边界像素
- cv.imshow("sure_bg", sure_bg)
- # 寻找前景区域sure_fg
- """ 距离变换的基本含义是计算一个图像中非零像素点到最近的零像素点的距离,也就是到零像素点的最短距离
- 一个最常见的距离变换算法就是通过连续的腐蚀操作来实现,腐蚀操作的停止条件是所有前景像素都被完全腐蚀。
- 这样根据腐蚀的先后顺序,我们就得到各个前景像素点到前景中心像素点的距离。根据各个像素点的距离值,设置
- 为不同的灰度值。这样就完成了二值图像的距离变换。
- cv2.distanceTransform(src, distanceType, maskSize)
- distanceType为距离类型CV_DIST_L1, CV_DIST_L2 , CV_DIST_C;maskSize为距离转换掩码的大小
- """
- dist_transform = cv.distanceTransform(opening, cv.DIST_L2, 5) # 距离变换
- dist_output = cv.normalize(dist_transform, 0, 1.0, cv.NORM_MINMAX) # 矩阵归一化,主要是为了显示出dist_output
- cv.imshow("dist_transform", dist_output * 50) # dist_output不乘50看不出来
- ret, sure_fg = cv.threshold(dist_transform, 0.7 * dist_transform.max(), 255, 0) # 图像二值化
- cv.imshow("sure_fg", sure_fg)
- # 找到未知的区域unknown
- sure_fg = np.uint8(sure_fg)
- unknown = cv.subtract(sure_bg, sure_fg) # 从sure_bg区域中减去sure_fg区域来获得unknown
- cv.imshow("unknown", unknown)
- # 类别标记
- ret, markers1 = cv.connectedComponents(sure_fg)
- print(ret) # 计算数量,但此时会把图像边框也算进去,因此ret会多1
- # print(markers1)
- # 为所有的标记加1,保证背景是0而不是1
- markers = markers1 + 1
- # print(markers)
- # 现在让所有的未知区域为0
- markers[unknown == 255] = 0
- # 使用分水岭算法
- markers3 = cv.watershed(image, markers=markers) # 边界区域将被修改标记为-1
- image[markers3 == -1] = [0, 0,255] # 边界区域画红色
- #创建黑色蒙版
- mask=np.zeros_like(image,np.uint8)
- mask[markers3 == -1]=(255,255,255)
- mask=cv.dilate(mask,np.ones(20,np.uint8))
- # print(markers3)
- fig, axes = plt.subplots(nrows=2, ncols=2, figsize=(10, 10))
- axes[0, 0].set_title("边框")
- axes[0, 0].imshow(mask, plt.cm.gray)
- axes[0, 1].set_title("原图")
- axes[0, 1].imshow(image[:,:,::-1])
- axes[1, 0].set_title("sure_fg")
- axes[1, 0].imshow(sure_fg, plt.cm.gray)
- axes[1, 1].set_title("sure_bg")
- axes[1, 1].imshow(sure_bg, plt.cm.gray)
- plt.show()
- cv.waitKey()
- if __name__=="__main__":
- image=cv.imread("DJI_0023.JPG")
- watershed_image(image)
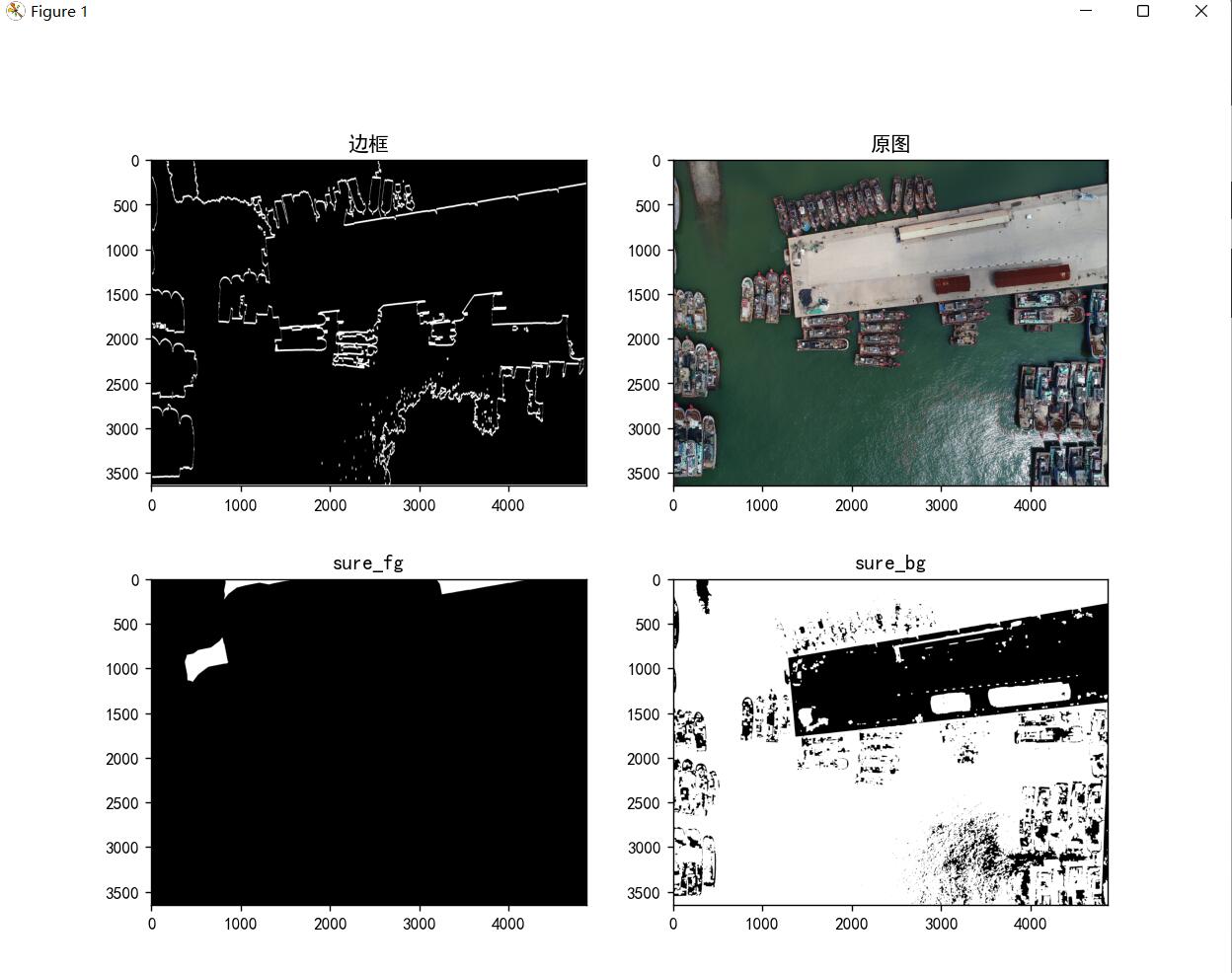
分水岭算法提取的边框比较规整,但是将顶上一部分水面也提取出来了,还是需要改进
-
相关阅读:
中秋节祝福程序源代码分享:土地分类数据阈值筛选和重投影分类
【LeetCode】每日一题 2024_5_14 完成所有任务需要的最少轮数(哈希)
【C++】C / C++ 内存管理
Docker部署jar包
IP 协议
工厂智能工具介绍——5W1H
spring下配置tomcat jdbc pool 报找不到“com.mysql.jdbc.Driver“类
【C++】lock_guard用法
转行软件测试我后悔了
ai的潜力和中短期的未来预测
- 原文地址:https://blog.csdn.net/qq_54263076/article/details/127190484
