-
51单片机循迹小车工作原理与程序设计思路
资源获取码:aaaa
.
.

.
.
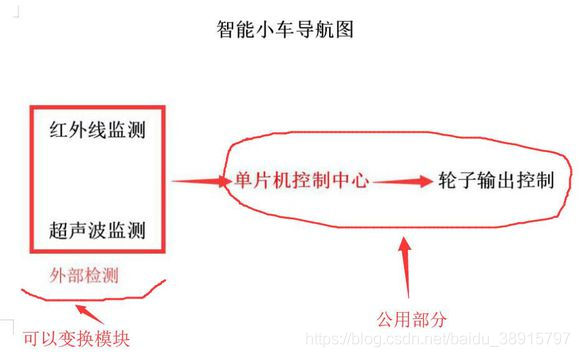
从上面导航图,我们可以看到,智能小车,共分为三步外部检测,控制中心,轮子输出控制。
等于人的

.
.
因为单片机控制中心和轮子输出控制是一样的,只有前面的外部检测,换个模块工作而已。
.
.
.
.
..
我们以一个循迹小车为例子讲解,当你明白这个后,其它的实验你就明白了。
先来讲解一下公共的控制中心,和轮子输出的组装。
.
. .
.
.组装小车,只需要三样东西。
1 车模。
2 控制中心板。
3 轮子电机驱动模块。
.
.1车模。
对于新手来说你需要一个车模,当然也可以自己制作一个模型,下面这个是两个电机的智能小车。
.
.
.
.上面这个车模包含有,1个车模底板,2个减速电机,2个轮子,1个万向轮(上面图片,电池盒下面那个),1个电池盒。
这种车模很多地方都有,你只要按照说明书组装成功就可以了。
.
.2 主控板
另外你还需要一个单片机最小系统作为控制中心
.
.
.
.这个主控板的单片机型号是,STC89C52RC,你也可以选择更高级类型的51单片机
.
.
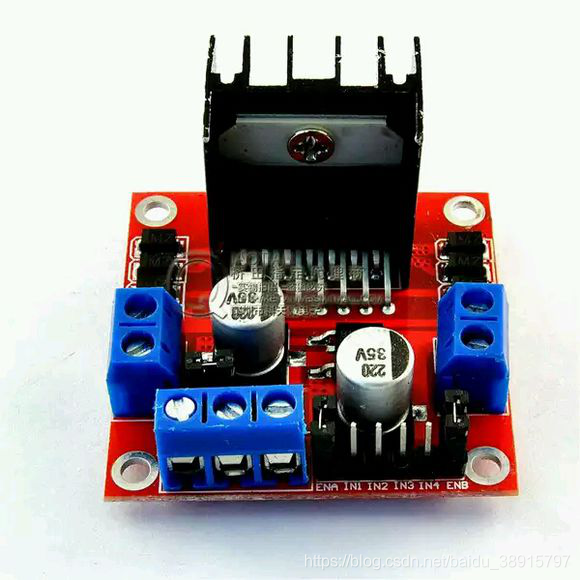
3 轮子电机驱动模块。
.
.
.
.这个电机驱动系统的模块是L298N(上面图片,最大黑色那个)
.
这种驱动模块是可以同时驱动两个电机的,完全可以满足你小车的驱动动力,为什么要驱动呢?因为主控板的电流太弱了,不够功率让电机运行,所以才会有电机驱动模块的产生。
.
.但是,不论外部检测是什么,上面的小车基础配置是公用的
.
.
.
.
.
下面是外部检测讲解。现在我们既然讲解的是循迹小车,那么你还需要循迹传感器
.
.
.
.循迹模块安装位置,如下图所示
…
.
.
.
.
就是这么简单,我们的循迹小车,配置模块就是这么多,
.
.
.
.
再通过程序的编写。我们的循迹小车,就可以循黑色线走了,非常简单。.
.
全套51单片机循迹小车程序与资料下载
.
.www.buffalotone.com/?p=2908
复制上面链接到浏览器,即可打开下载
希望同学们喜欢了!.
.
. -
相关阅读:
linux-gic中断分析
Redis网络模型-IO多路复用
ESP8266/ESP32 通过TimeLib库获取NTP时间方法
【Java进阶篇】第七章 多线程
计算机网络-网络层:IP协议
YOLOv5 分类模型 数据集加载 3
【附源码】计算机毕业设计SSM食疗养生服务平台
网络安全面试、实习、校招经验打包分享
【MATLAB源码-第44期】基于matlab的2*2MIMO-LDPC系统的误码率仿真。
利用无线技术实现分散传感器信号远程集中控制
- 原文地址:https://blog.csdn.net/baidu_38915797/article/details/125419737